【论文推荐】长沙理工大学 钱学威 李云丰 等:MMC模型预测控制稳定性分析及其高频振荡抑制
- 2026-05-29 15:24:57
本文引文信息(点击题目,阅读全文)
钱学威, 李云丰, 文涛, 等. MMC模型预测控制稳定性分析及其高频振荡抑制. 电力工程技术, 2026, 45(1): 62-71.
本文摘要
模型预测控制(model predictive control, MPC)凭借其响应速度快、建模简单等优点,已应用于模块化多电平换流器(modular multilevel converter, MMC),但关于其高频振荡抑制还未展开研究。首先,文中构建MMC预测控制数学模型,结合传统控制中dq阻抗建模方法,利用Z变换实现MPC的正负序阻抗建模。其次,推导出MMC本体离散传递函数并进行稳定性分析,在本体稳定前提下,运用阻抗法揭示MPC中MMC产生高频振荡的机理。然后,针对链路延时引起的高频振荡,运用多步预测控制实现抑制,并基于阻抗模型分析出多步预测对局部高频段的优化作用。最后,理论分析得到MMC需要通过增大预测步数来补偿链路延时的增大,电磁暂态仿真验证了多步预测控制抑制高频振荡的有效性与正确性。
MMC模型预测控制稳定性分析及其高频振荡抑制
钱学威, 李云丰, 文涛, 张佳琳, 张雨杭
长沙理工大学(电网防灾减灾全国重点实验室)
基金项目:国家自然科学基金资助项目
(52207187,U23B20128)
湖南省自然科学基金资助项目
(2024JJ5021)
引言
柔性直流输电系统中模块化多电平换流器(modular multilevel converter, MMC)因无低频谐波、可控性好、支撑能力强等优点,已成为主流拓扑之一。然而,电力电子设备之间存在复杂的耦合作用,交流线路接入电网后可能会引发高频振荡,导致系统出现过电压、击穿设备、系统闭锁停运等事故,造成严重的经济损失。MMC产生高频振荡的关键影响因素为整体链路延时,其更深层次原因是整体链路延时的存在导致MMC高频负阻尼出现。但在MMC控制过程中延时无法完全消除,为解决柔性直流输电系统中的高频振荡问题,须采用相关控制策略补偿链路延时,从而实现高频负阻尼优化。
模型预测控制(model predictive control, MPC)因动态响应快和适用于非线性多约束系统等优点,在非线性电力装备中得到广泛应用。传统MMC预测控制(单步预测)实现方式之一为通过遍历开关状态择优选取子模块开关组合。相关文献将多级MPC与二分法相结合,在不遍历所有开关状态的情况下实现输出电流跟踪控制,减少控制器计算量。相关文献提出利用环流、负载电流和电容电压等参数的方法间接控制MMC,使计算量与子模块的数量无关。上述方法降低了预测控制单控制周期运算量,但控制系统仍存在一定的计算延时。在实际工程中,MPC未广泛应用于MMC,因此关于MPC下柔性直流换流站高频振荡机理的研究较少。
为研究MPC下MMC中的链路延时导致的高频振荡问题,须对MMC进行稳定性分析,以揭示高频振荡产生机理。相关文献搭建MMC无差拍电流预测控制器,在Z域中构建换流站传递函数,并分析延时下无差拍预测控制下MMC稳定性。相关文献对有源电力滤波器采用预测无差拍重复控制,并根据Z域内的闭环传递函数进行稳定性判定。上述方法能有效判断换流站稳定性状态,但仍需要进一步揭示高频振荡的产生机理。在传统双闭环控制下,MMC主要采用序阻抗建模与dq阻抗建模分析MMC的稳定性和振荡机理,同理可以对MPC下MMC进行阻抗建模,运用阻抗分析法进一步揭示系统高频振荡产生机理。
分析得到高频振荡产生机理后,运用合适的控制策略抑制高频振荡,并进行原理分析。现有研究通过修正参考电流实现延时补偿,包括拉格朗日外推法、重复控制器、矢量角补偿法,上述方法只对外环进行改善却无法优化高频段阻尼特性。在传统控制中,除链路延时外,MMC高频阻抗特性关键影响因素为内环控制器参数,而MPC取代内环参与控制,因此须对预测控制内部过程进行改善,以补偿链路延时。相关文献提出利用多步预测控制对永磁同步电机进行电流控制。相关文献 针对永磁同步电机电流控制易受系统延时影响这一特点,提出一种带延时补偿的自适应无差拍电流预测控制算法。延时补偿机理还须进一步分析,文中重点研究多步预测实现高频振荡抑制的机理。
文中基于MMC搭建MPC,运用Z变换对MPC下MMC进行正负序阻抗建模;构建MMC本体简化的开环传递函数,再利用Z函数判稳确定本体稳定性;在保证本体稳定的前提下,基于阻抗法理论分析出多步预测控制对MMC某高频段负阻尼区域的优化作用,补偿由链路延时导致的部分高频负阻尼,实现高频振荡抑制;通过电磁暂态仿真验证多步预测控制抑制高频振荡的有效性。
1. MMC拓扑与数学模型
图1为三相MMC整流器拓扑。其中,usj为三相电压(j=a, b, c);isj为三相电流;udc为直流电压;Rg为交流等效电阻;Lg为交流等效电感;Larm为桥臂电感;ujp、ujn分别为各相上、下桥臂等效输出电压,电压值由开通子模块数量决定;evj为MMC阀侧三相电压等效值。
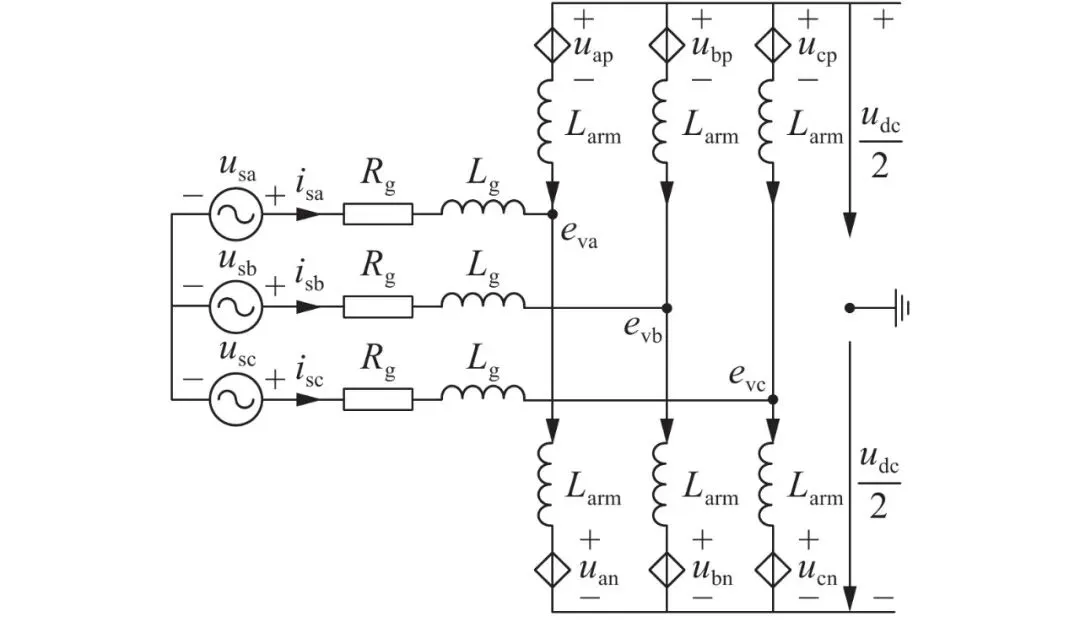
图1 MMC拓扑
目前MMC控制策略往往采用双闭环比例积分(proportional integral, PI)控制,通过垂直两相坐标系进行建模与设计,采用线性控制器和复杂的级联结构,控制算法复杂且控制器计算负荷过大。MPC因具有多目标控制、模型建立简单、动态响应快等优点,已成为MMC控制策略之一。
实际电路中,交流系统与换流阀之间的电压电流关系方程为:

式中:Leq为交流线路和桥臂的等效电感;Req为交流线路和桥臂的等效电阻。采用前向欧拉公式,对式(1)进行离散化,得到:

式中:Ts为预测控制周期;k为当前时刻。MPC根据当前系统状态信息和上一周期预测控制的相关输出,预测未来被控对象的状态,遵循预测模型、滚动优化和反馈校正的基本原理。MMC电流指令值由外环提供,表达式为:
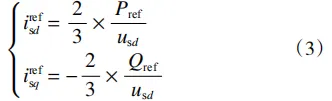
式中: 分别为dq坐标系下外环电流指令值的d、q轴分量;Pref、Qref分别为给定有功功率与给定无功功率;usd为dq坐标系下d轴电压。
分别为dq坐标系下外环电流指令值的d、q轴分量;Pref、Qref分别为给定有功功率与给定无功功率;usd为dq坐标系下d轴电压。
预测控制通过不断寻求MMC各开关状态不同组合,实现目标函数最小。目标函数J为:

式中: 为三相坐标系下外环电流指令值。通过求取目标函数J最小值下MMC子模块开关状态,实现电路预测电流值接近指令值。
为三相坐标系下外环电流指令值。通过求取目标函数J最小值下MMC子模块开关状态,实现电路预测电流值接近指令值。
由式(2)可知,电流预测控制本质上为开环模型,控制系统存在一定的稳态误差。为消除有功功率和无功功率稳态误差,文中加入一个控制系数极小的PI补偿器。
图2为MPC框图,与传统MMC控制方式相比,其内环替换为MPC模块。图中Njm(j=a, b, c;m=p, n)为三相上下桥臂子模块投入个数;P、Q分别为MMC有功输出和无功输出。
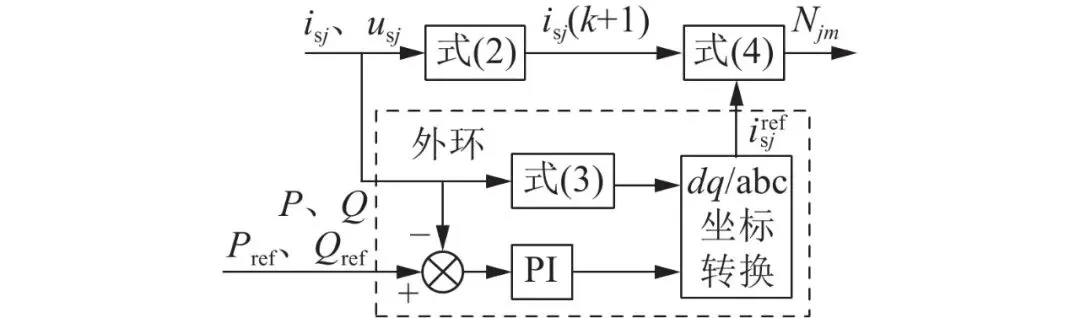
图2 MPC示意
MPC基于当前状态,通过预测三相上下桥臂子模块开通个数实现目标寻优,使预测输出电流接近指令值,算法流程如图3所示。其中, 分别为三相上、下桥臂子模块平均电压;N为上、下桥臂子模块数。MPC在初始状态下通过计算各种上下桥臂投入子模块数量组合来预测k+1时刻的电流,然后与指令电流相比,求取使目标函数值最小的子模块开通组合状态,最终实现MMC电流跟踪。
分别为三相上、下桥臂子模块平均电压;N为上、下桥臂子模块数。MPC在初始状态下通过计算各种上下桥臂投入子模块数量组合来预测k+1时刻的电流,然后与指令电流相比,求取使目标函数值最小的子模块开通组合状态,最终实现MMC电流跟踪。
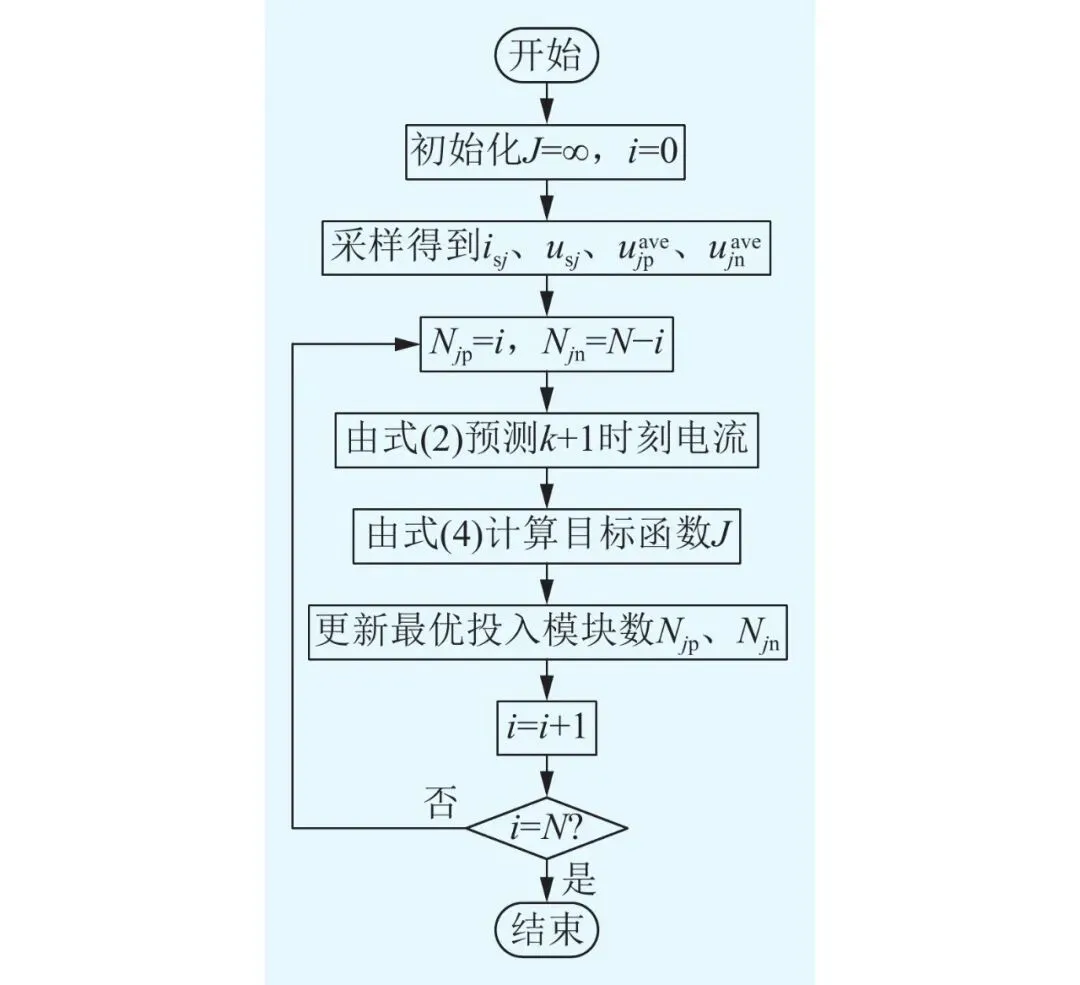
图3 MPC流程
在MPC中,系统存在由数字处理时间和数据采样时间形成的链路延时,链路延时对MMC稳定性影响较大。为研究链路延时对MMC稳定性的影响机理,须构建阻抗模型并通过阻抗法分析出失稳频率点,提出相关抑制措施,实现MMC稳定运行。
为便于后续稳定性分析,须降低建模难度,文中环流抑制仍采用传统PI控制。相关文献已列举环流控制器的建模过程,文中不再赘述,仅重点研究MPC模块阻抗建模过程。对式(4)的绝对值取平方以保证目标函数的正数特性,即:

联立式(2)与式(4)可得目标函数为:

其中:
以三相中一相为例,联立式(5)与式(6)后可得单相目标函数g1:

MPC最终目的为寻找合适的阀侧电压输出值evj,因此通过对函数g1中相关变量evj求取偏导得到函数极值点。又因为二阶偏导恒大于0,因此可求得当函数g1最小时,阀侧电压evj为:

由于在实际工程线路中Req远小于Leq/Ts,且文中仿真等效电阻Req=0 Ω,因此可以忽略Req对阻抗建模的影响。文中基于dq坐标系进行阻抗建模,式(9)可进一步转化为:
式中:evd、evq分别为dq坐标系下阀侧电压d、q轴分量;isd、isq分别为dq坐标系下d、q轴电流;usq为dq坐标系下q轴电压。
MMC阻抗模型包括控制部分和MMC本体,文中致力于对高频振荡进行稳定性分析,可忽略桥臂内部动态过程、环流控制、外环与锁相环等。针对数学建模的准确度提出以下2种情况。情况1:不忽略所有影响因素,建立详细模型;情况2:忽略内部动态过程与环流控制,建立平均值模型。
联立控制系统和MMC本体交流侧后阻抗矩阵为多阶,为降低阻抗求取难度,只需要联立与dq坐标系下MMC交流侧电流和电压相关的矩阵,在忽略MMC内部动态过程与环流抑制后,模型阻抗如式(11)所示。

其中:
式中:∆isd、∆isq分别为电流d、q轴分量变化量;∆usd、∆usq分别为电压d、q轴分量变化量;分别为MMC旋转坐标系下的dd、dq、qd、qq通道下阻抗;Gde为MMC整体链路延时;Gpq为有功无功控制函数;Tpll为锁相环控制函数;Isd0、Usd0为系统处于稳定状态下isd、usd稳态值;Evd0、Evq0为系统处于稳定状态下evd、evq稳态值;ω为角频率;ω0为基波角频率;L为电感;z为Z域下复数。
将dq阻抗转换为正负序阻抗,并进行正负序阻抗法分析。图4为2种情况下正负序阻抗建模结果及其与MMC扫频结果对比。可以看出,理论计算结果与扫频结果基本吻合,平均值模型在高频部分无明显变化,证明阻抗建模结果正确。文中重点研究高频振荡,可利用平均值模型进行分析。
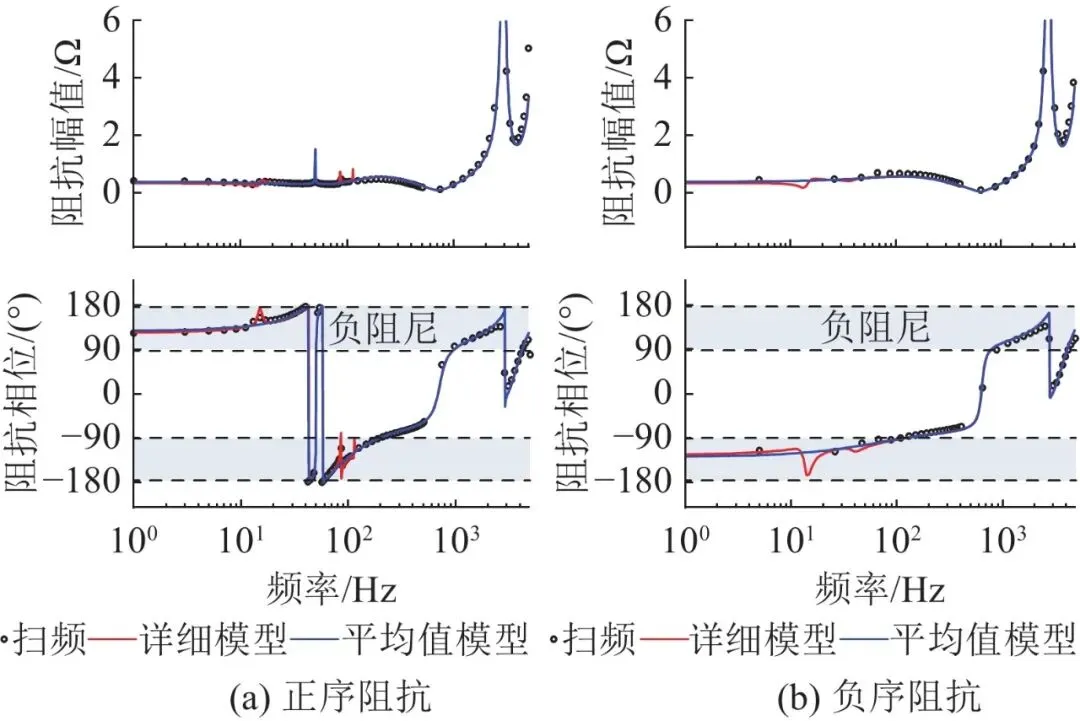
图4 理论与计算结果对比
2. 稳定性分析
进行阻抗法分析的前提为2个子系统均各自稳定,因此须先对MMC本体进行稳定性分析,确保本体稳定。MMC本体通过零阶保持器将S域转化到Z域可得Gp(z),其中s为S域下复数。

由式(2)可得MPC下电流控制数学表达式为:

由式(15)可得离散域下MMC等效交流电流控制,如图5所示。图中z−1为链路延时模块;u(z)、i(z)分别为离散域下MMC交流侧等效电压和电流;iref(z)为离散域下MMC参考电流。此处示例的链路延时为100 μs。
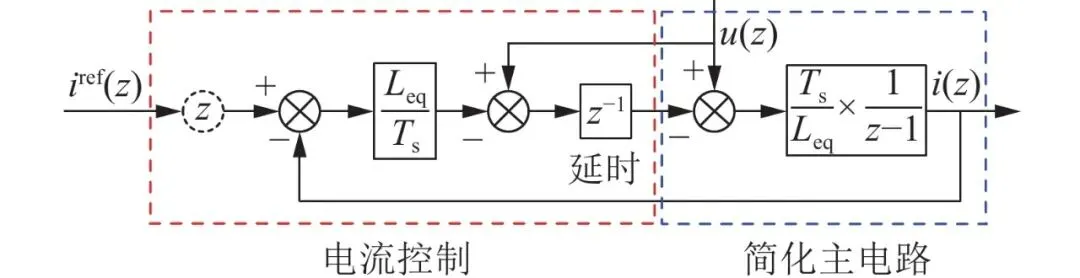
图5 交流电流控制框图
延时100 μs时,开环特征表达式为:

极点 ,极点由Z平面原点转变为单位圆上的点,由Z函数稳定性判定可知MMC临界稳定。延时200 μs时,特征表达式为:
,极点由Z平面原点转变为单位圆上的点,由Z函数稳定性判定可知MMC临界稳定。延时200 μs时,特征表达式为:

极点z1=0.877+j0.745,z2=0.877−j0.745,z3=−0.755,存在一对极点在单位圆外,系统失稳。文中MMC控制周期为100 μs,可知,传统MPC即单步预测在单个控制周期内能稳定运行,但随着链路延时的增大,会诱发MMC本体失稳。
MPC下MMC和交流线路正负序阻抗如图6所示。MMC在低频与高频处均存在相位超过90°的区域,此时MMC在高频区域的负电感特性与交流系统电容特性相互影响作用,则可能导致MMC产生高频振荡。
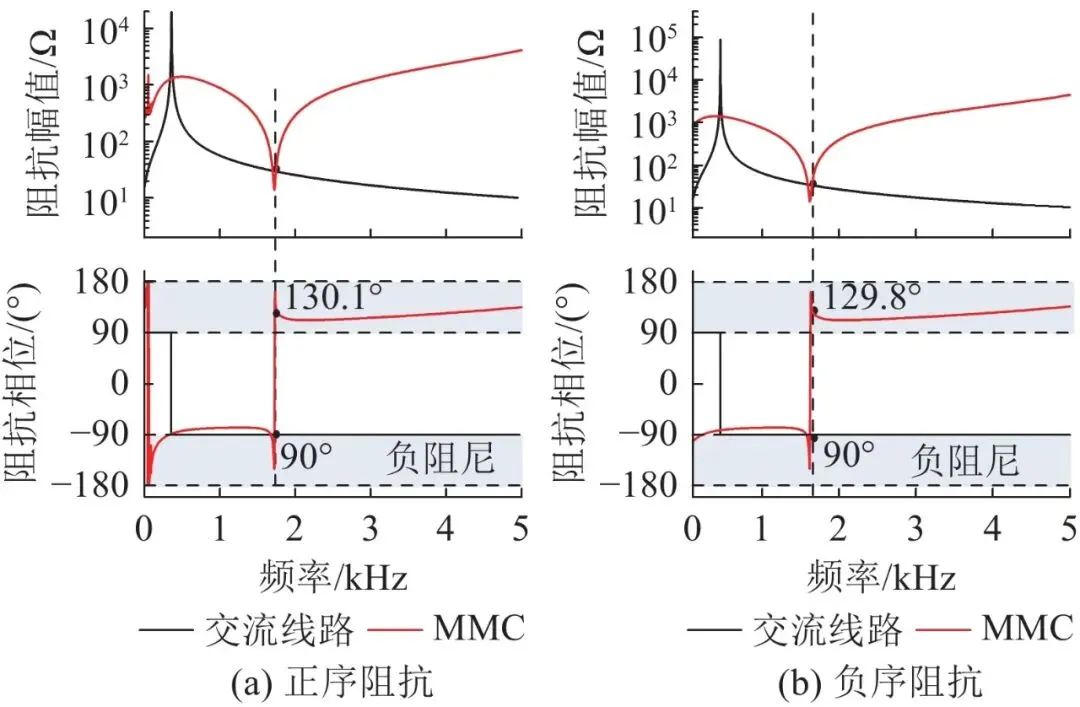
图6 正负序阻抗分析
单步预测下,链路延时100 μs时,MMC判定为自身稳定,因此可用阻抗法进行稳定性分析。通过傅里叶分析可得三相坐标系中存在
针对MPC中计算延时,外环可采用重复控制器对参考电流进行预测修正以实现延时补偿,其参数设计过程相关文献有所提及。重复控制器将电流误差值整合到下一个控制周期的电流指令值中,即对参考电流进行前置补偿,优化由控制延时导致的系统稳定性问题。重复控制器在离散域中的控制框图如图7所示。
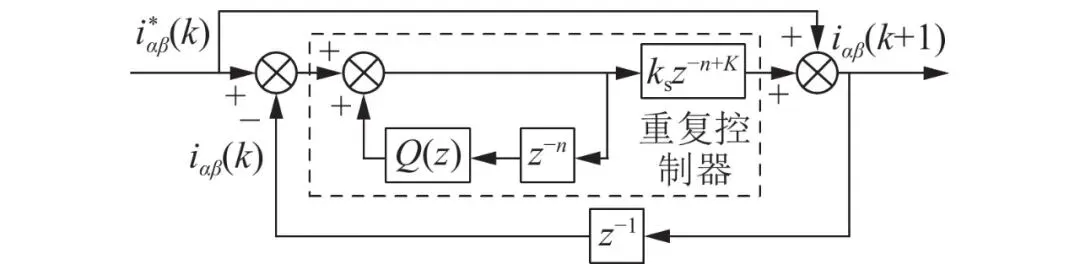
图7 重复控制器控制框图
重复控制器可等效为准积分器,其中, 为αβ旋转坐标系下外环输出的参考电流值;iαβ(k)为当前时刻实际输出电流值;iαβ(k+1)为经重复控制器修正后的参考电流预测值;ks为重复控制器的增益系数;Q(z)为重复控制器积分系数,一般取值0~1;n为一个基波控制周期的采样次数;K值为1,表示预测值进行超前一拍补偿。为保证重复控制器的稳定性,系数须满足以下不等式:
为αβ旋转坐标系下外环输出的参考电流值;iαβ(k)为当前时刻实际输出电流值;iαβ(k+1)为经重复控制器修正后的参考电流预测值;ks为重复控制器的增益系数;Q(z)为重复控制器积分系数,一般取值0~1;n为一个基波控制周期的采样次数;K值为1,表示预测值进行超前一拍补偿。为保证重复控制器的稳定性,系数须满足以下不等式:

文中以Q(z)取0.95为例,由式(18)可计算得到增益系数ks的取值范围为0.05~2.05,为保证补偿作用的平滑效果,应设置ks<1。重复控制器数学表达式为:

在相同链路延时下,对比重复控制器加入MMC控制系统前后正负序阻抗的变化情况,研究补偿链路延时能提高系统稳定性的原理。加入重复控制器前后阻抗变化如图8所示。
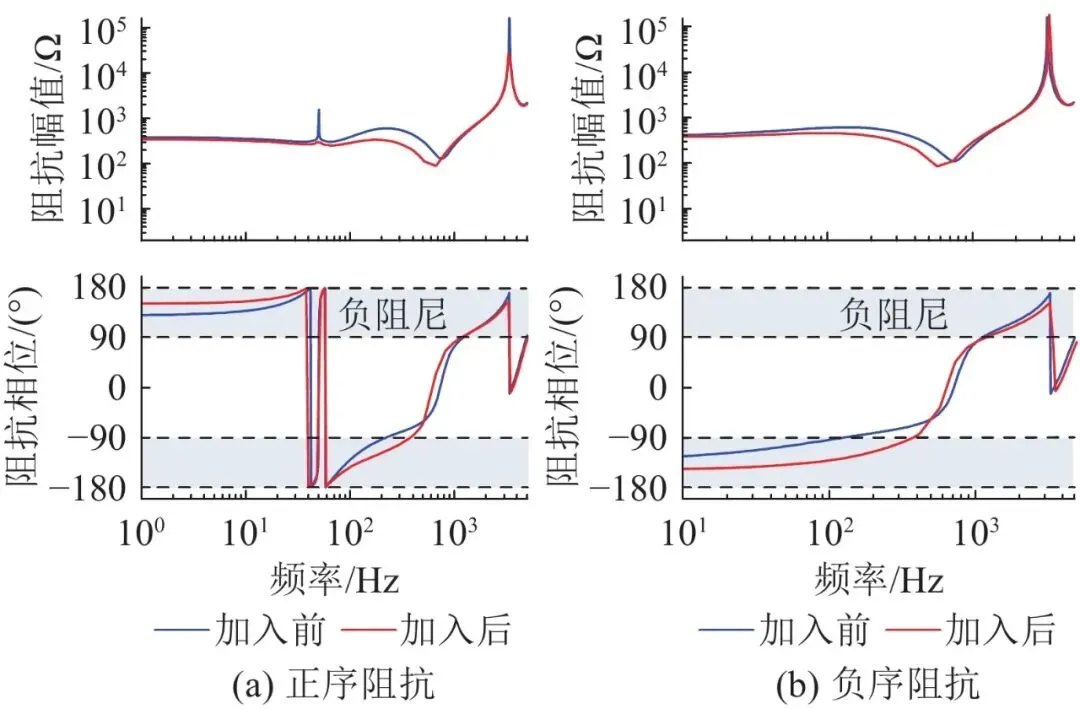
图8 加入重复控制器前后阻抗变化
可见,高频部分负阻尼特性有所优化,且负阻尼区域右移,但优化频段集中在
3. 多步预测控制及其分析
传统预测控制下,当链路延时超过一个控制周期时,MMC自身会发生失稳现象。而实际控制过程与信号传输中,链路延时大于100 μs,因此传统预测控制无法满足MMC自身稳定性,故采用多步预测,期望通过补偿链路延时提高MMC自身稳定性并抑制高频振荡。
预测算法基本原理如图9所示,其中黑线为前一步预测下选取的最优开关组合,红线为被控量x的参考曲线,蓝线代表单步预测下所有开关组合,绿线代表多步预测下所有开关组合,x*(k)、x*(k+1)、x*(k+2)分别为tk、tk+1、tk+2时刻被控量参考值。单步预测以采样值x(k)为基准,利用离散数学模型,通过获得目标函数最优解对应的开关状态实现MMC稳定运行。但在MMC实际控制系统中,检测装置、控制器运行、数据传输等会产生一定的链路延时,这些延时无法避免。单步预测可在一个控制周期内实现被控量的最优状态,若链路延时远大于控制周期,实际参考值应为x*(k+2)。单步预测因没有计算其他开关状态下可能包含的最优信息,无法实现最优跟踪效果,从而导致MMC发散或产生振荡。
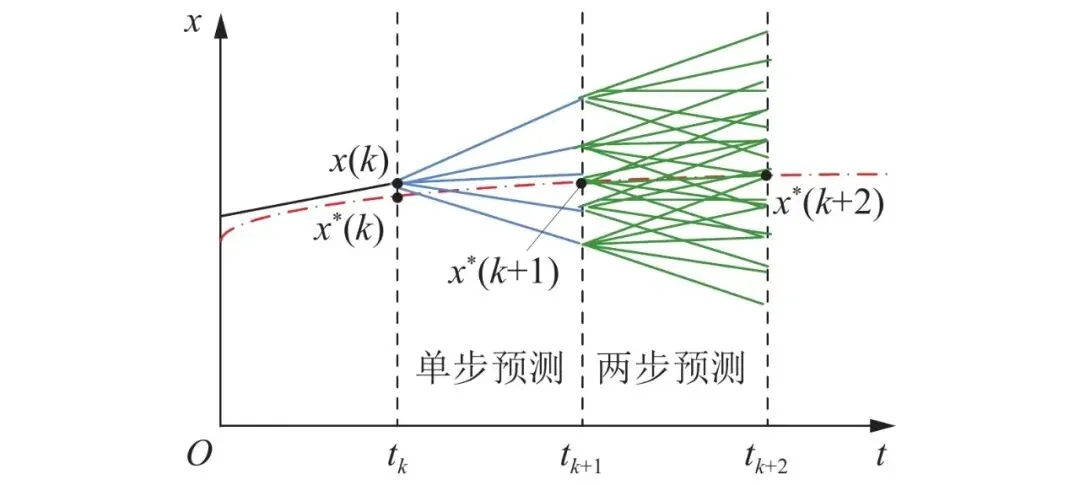
图9 多步预测原理
以两步预测为例,被控量x以时刻tk为基准,多一个控制周期预测tk+2时刻的开关状态,进一步加强MMC稳定性。
多步预测流程与图3类似,不同之处为根据式(2),两步预测基于k+1时刻对k+2时刻进行预测。当控制周期较小时,相电压usj与阀电压evj前后变化不大,可以忽略,因此可得预测电流值为:
将isj(k+2)与参考电流进行对比,实现预测控制,三步甚至多步预测同理。
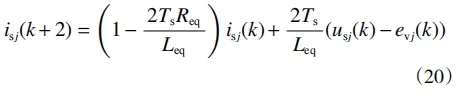
实际工程中,限于当前硬件性能和控制方式,MMC整体链路延时在300 μs左右,以300 μs链路延时为基准,以两步预测、三步预测和四步预测方式分析多步预测对MMC稳定性的影响。文中仅对正序阻抗进行分析,负序阻抗基本一致。
图10为多步预测对MMC阻抗特性的影响。多步预测对
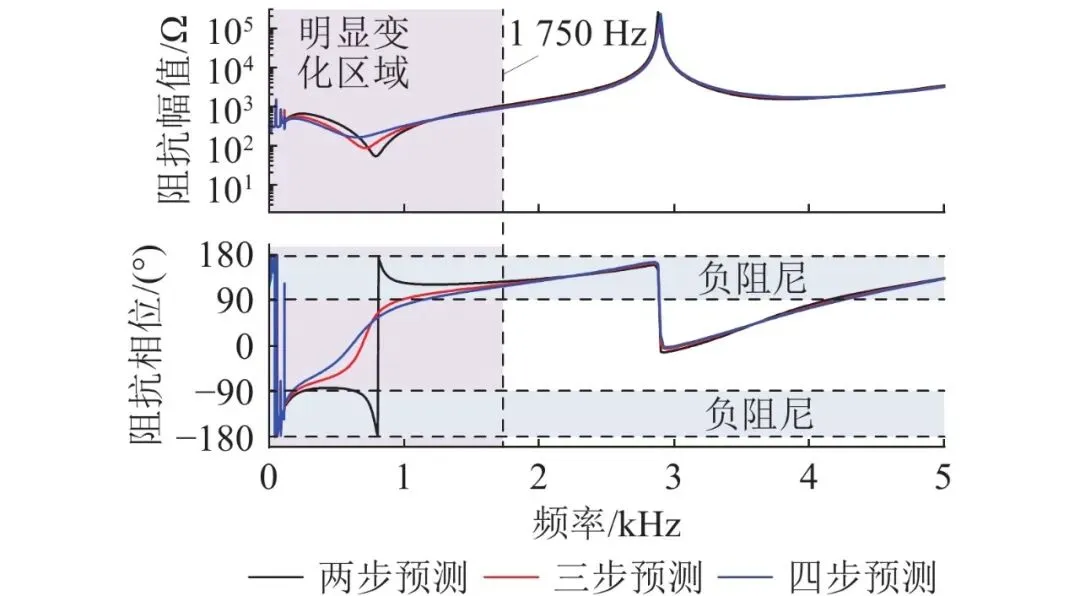
图10 多步预测MMC特性分析
进行阻抗法分析的前提是MMC自身稳定,以两步预测为例,其控制框图如图11所示。在300 μs链路延时与两步预测控制下,开环传递函数表达式存在一对极点(z1=0.916+j0.458,z2=0.916−j0.458)在单位圆外,MMC本体失稳。当换流器为三步预测控制时,不存在单位圆外的极点,MMC本体稳定。
图11 两步预测控制框图
当链路延时为300 μs,预测控制为三步预测时,MMC本体稳定且经电磁暂态仿真未发生振荡。图12为三步预测正负序阻抗,可知,未发生振荡原因在于MMC与交流线路幅值交点处相位差未超过180°,但高频段仍存在负阻尼区间,若增大链路延时则MMC可能会产生高频振荡。
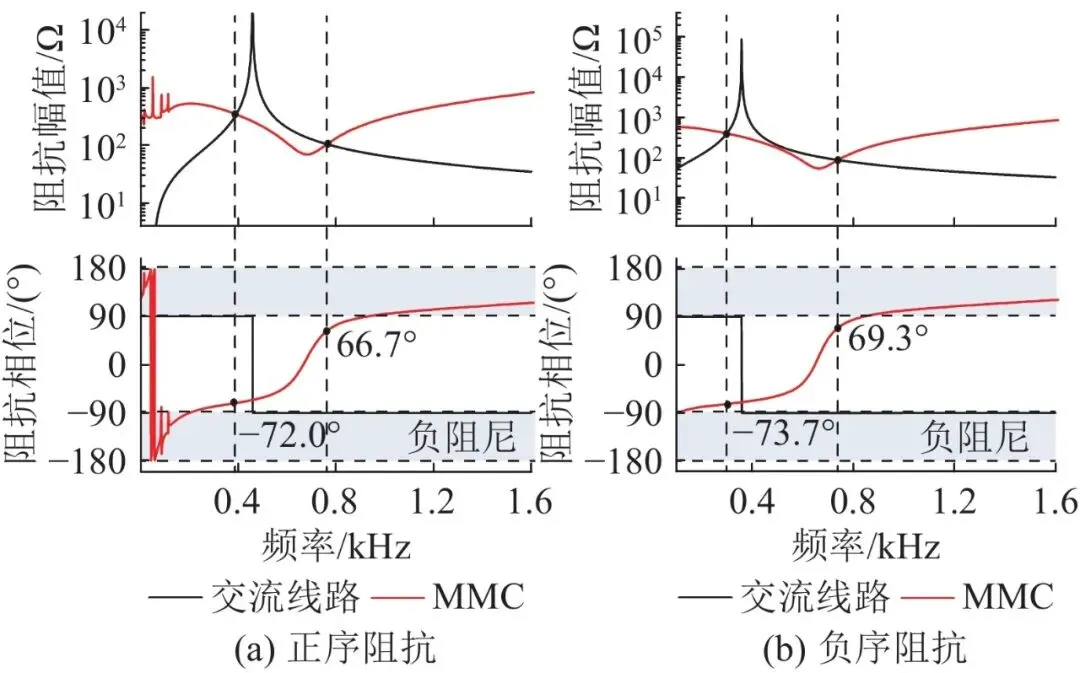
图12 三步预测正负序阻抗
当控制方式为三步预测时,链路延时由300 μs延长为400 μs,系统产生振荡,经傅里叶分析为640 Hz负序振荡与740 Hz正序振荡。
在进行阻抗稳定性分析之前,要判断MMC稳定性,根据MMC开环特征表达式计算得到无在单位圆外的特征根,则判定MMC本体稳定。为抑制由链路延时导致的高频振荡问题,将控制方式由三步预测切换为四步预测,阻抗分析如图13所示。
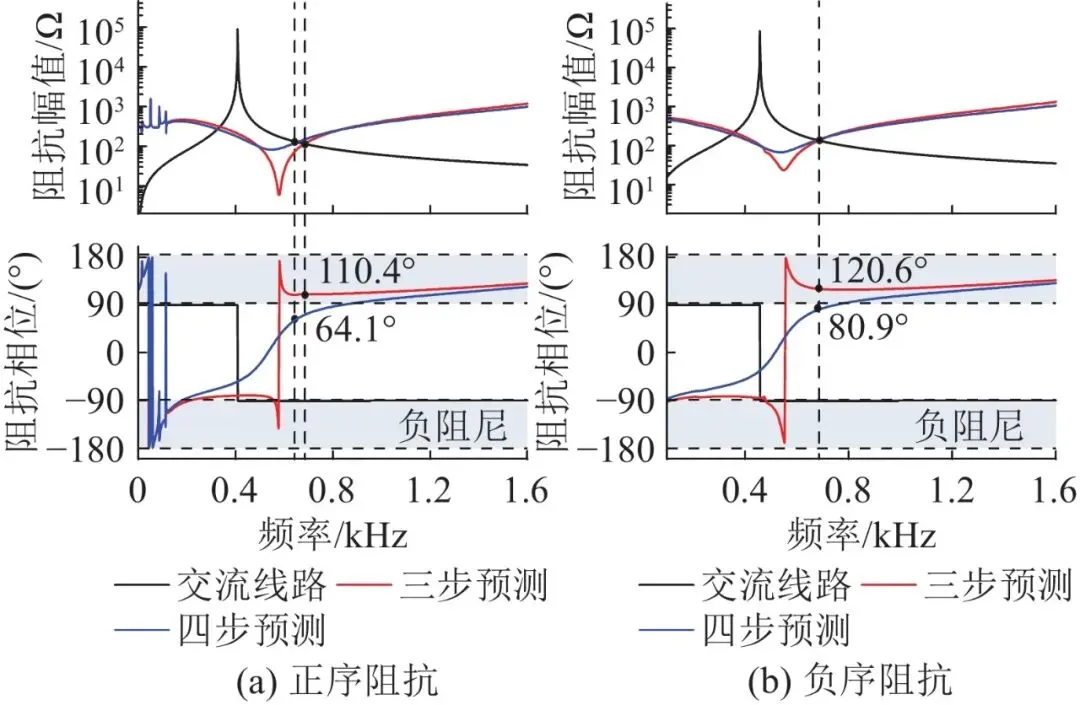
图13 三步到四步预测阻抗分析
原三步预测在400 μs链路延时下存在683 Hz的负序振荡与685 Hz的正序振荡,该频率处换流站与交流线路阻抗幅值产生交点且相位差超过180°。切换为四步预测后,幅值相交频率变化很小,但换流站由原来的负阻尼特性变为正阻尼特性,即正序相位从110.4°变为64.1°,负序相位从120.6°变为80.9°。从上述分析可得高频振荡抑制原理为实现负阻尼区域转移,从而消除特定振荡频率点。
结合前面稳定性分析可得出以下规律:较高链路延时加入会产生高频振荡,甚至使MMC系统本身发生失稳,但随着预测步数增多,补偿高延时效果变好,系统稳定性增强。为验证此想法,继续增加链路延时,链路延时为500 μs,控制方式由四步预测变为五步预测,同理,500 μs时四步与五步预测下MMC自身稳定,不再赘述。
通过傅里叶分析可得,原四步预测在500 μs链路延时下存在571 Hz的负序振荡与671 Hz的正序振荡。阻抗分析如图14所示,正序613 Hz处发生振荡,负序623 Hz处发生负序振荡,切换为五步预测控制后,幅值交点处相位差满足稳定条件,此高频振荡点得到有效抑制。
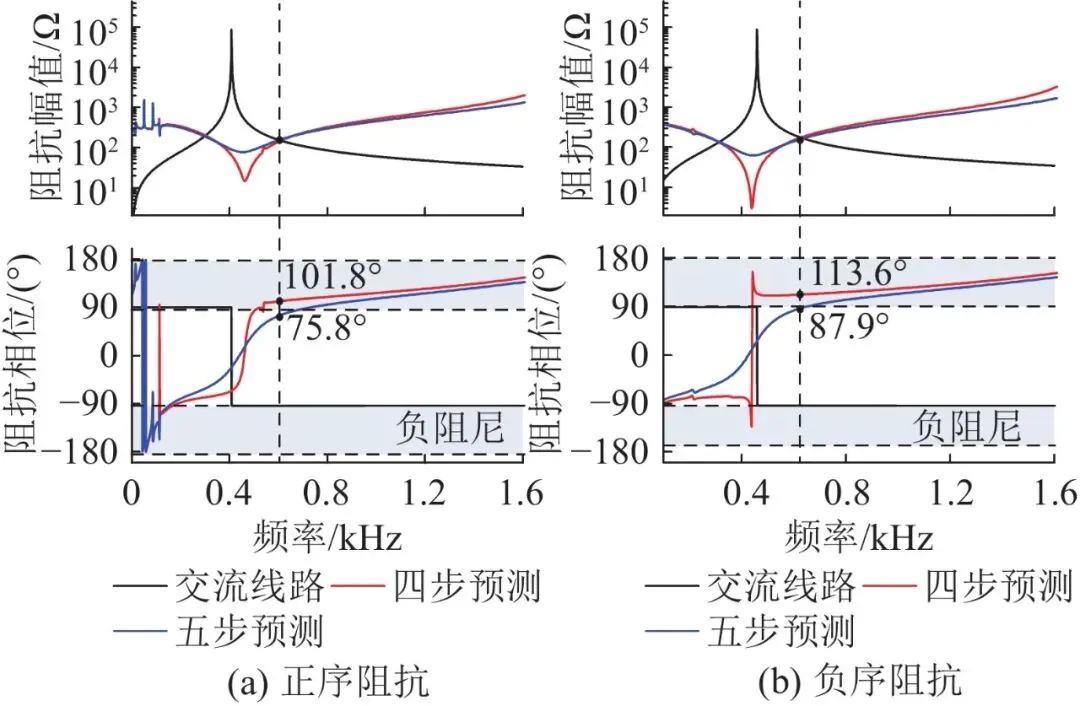
图14 四步到五步预测阻抗分析
4. 电磁暂态仿真
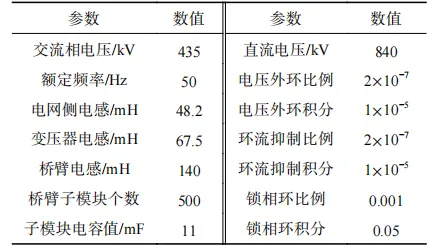
文中搭建MMC单侧换流站系统,系统参数见表1,仿真步长为10 μs,控制周期为100 μs,仿真验证基于1 250 MW定有功控制与0 var定无功控制。
表1 系统仿真参数
前文指出MPC中指令电流由有功和无功参考值计算得出,由于仿真电路中电压电流不确定,且对于外环未形成一个闭环控制,因此系统存在一定的稳态误差,文中采用参数极小的PI补偿控制器消除稳态误差。图15(a)为有功和无功参考值变化下,加入补偿控制器前后的跟踪误差对比,图15(b)为加入补偿控制后,a相电流随有功和无功的变化情况,随着有功功率的变化,三相电流值有所调整,且处于稳定状态。由图15(a)可以看出,原预测控制在无功功率上存在一定的误差且程度各异,系统加入PI补偿控制器后提升了控制的精准性。
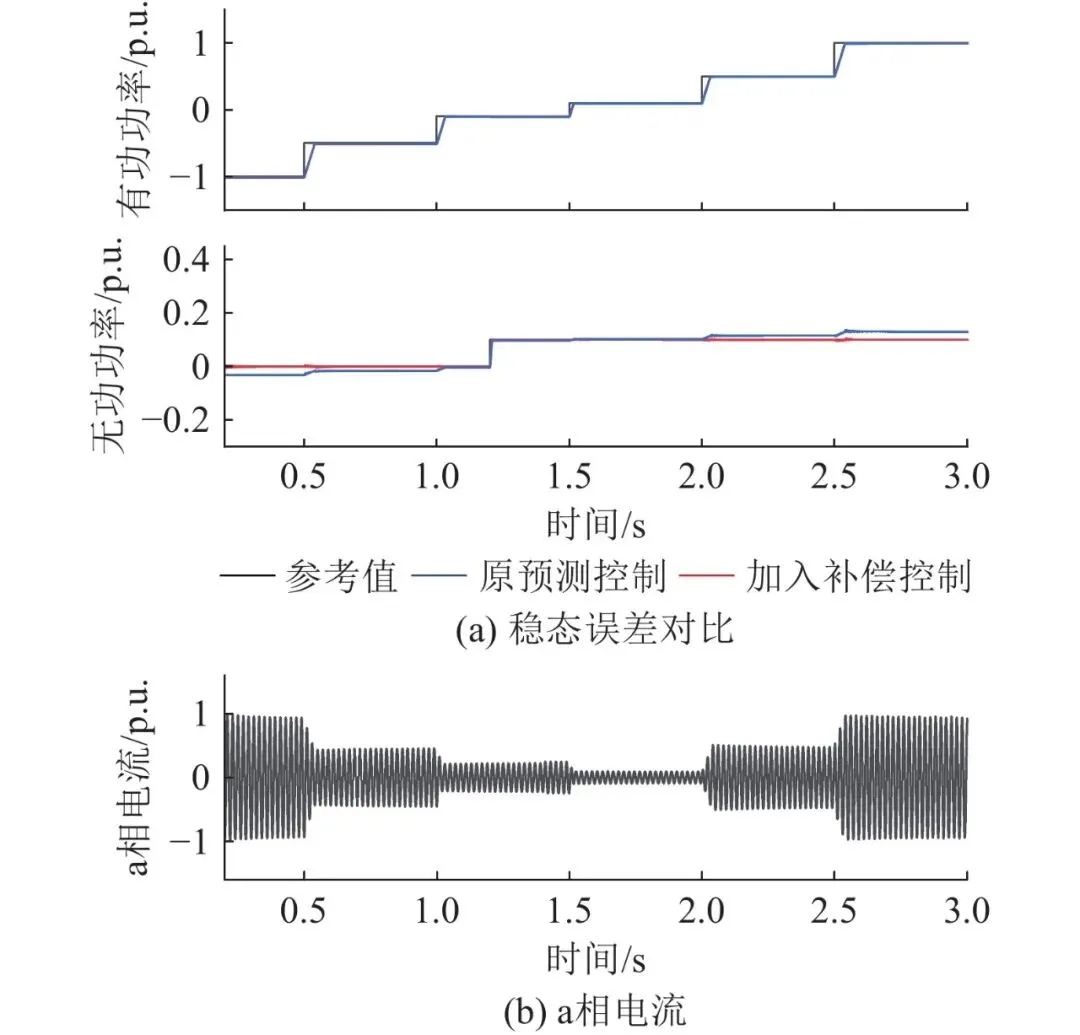
图15 稳态误差对比和a相电流变化
图16为重复控制和多步预测控制下延时补偿效果对比,验证了多步预测的优越性。0.3 s时MMC链路延时为130 μs,重复控制和单步预测控制下系统处于稳定,结合前文单步预测下链路延时超过100 μs时换流站会失稳的结论可以得出,重复控制对系统链路延时有补偿作用。0.4 s时链路延时增大至200 μs,在原控制下系统发生高频振荡。0.5 s时将控制方式切换为两步预测,系统恢复稳定。可知,重复控制器对链路延时的补偿具有一定的局限性,多步预测能更好地适应高延时系统。
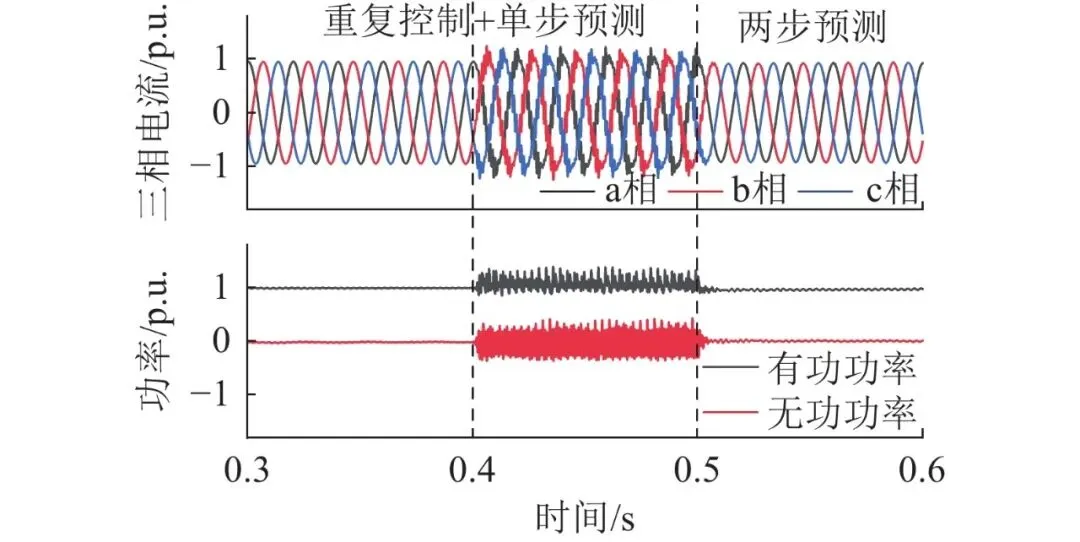
图16 重复控制器和多步预测延时补偿对比
为验证多步预测更能适应换流站高链路延时系统,文中不断增大链路延时以验证多步预测抑制高频振荡的有效性,三相电流与有功无功变化如图17所示。阶段一:链路延时300 μs,控制方式为三步预测。阶段二:0.4 s时链路延时增至400 μs,发生高频振荡;0.46 s时控制方式切换为四步预测,高频振荡得到抑制。阶段三:0.6 s时链路延时增至500 μs,发生高频振荡;0.65 s时控制方式切换为五步预测,高频振荡得到抑制。
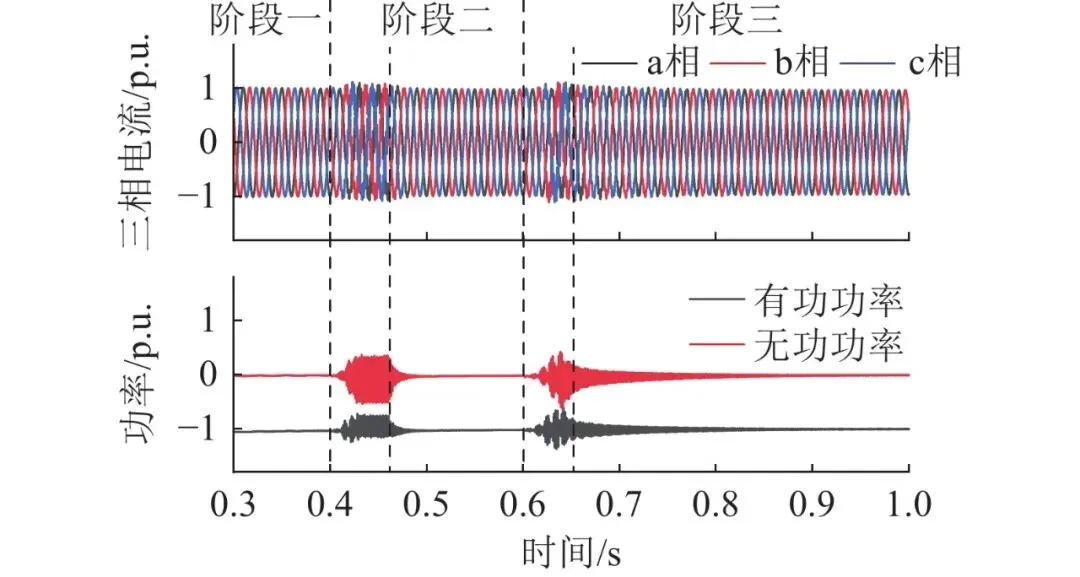
图17 电磁暂态验证振荡抑制
由图17可见,MMC启动时,由于模型预测的开环特性,稳态值并未达到设定值,但随着外环PI补偿器作用,稳态误差逐渐消除。图中链路延时初始值为300 μs,控制方式为三步预测,延时增至400 μs,发生高频振荡,投入四步预测,振荡得到抑制,延时增至500 μs,投入五步预测,产生的高频振荡得到抑制。文中基于电磁暂态仿真模型,通过变化链路延时和预测控制方式,验证了多步预测控制能有效抑制特殊频段的高频振荡点。
选取不同工况,仿真验证多步预测控制抑制换流站高频振荡的有效性。图18为无功功率0 p.u.,有功功率−0.5、−0.1、0.1、0.5、1.0 p.u.时上述3个阶段的有功功率和无功功率变化情况,可以看出,5种工况下多步预测都能抑制由高链路延时导致的高频振荡。
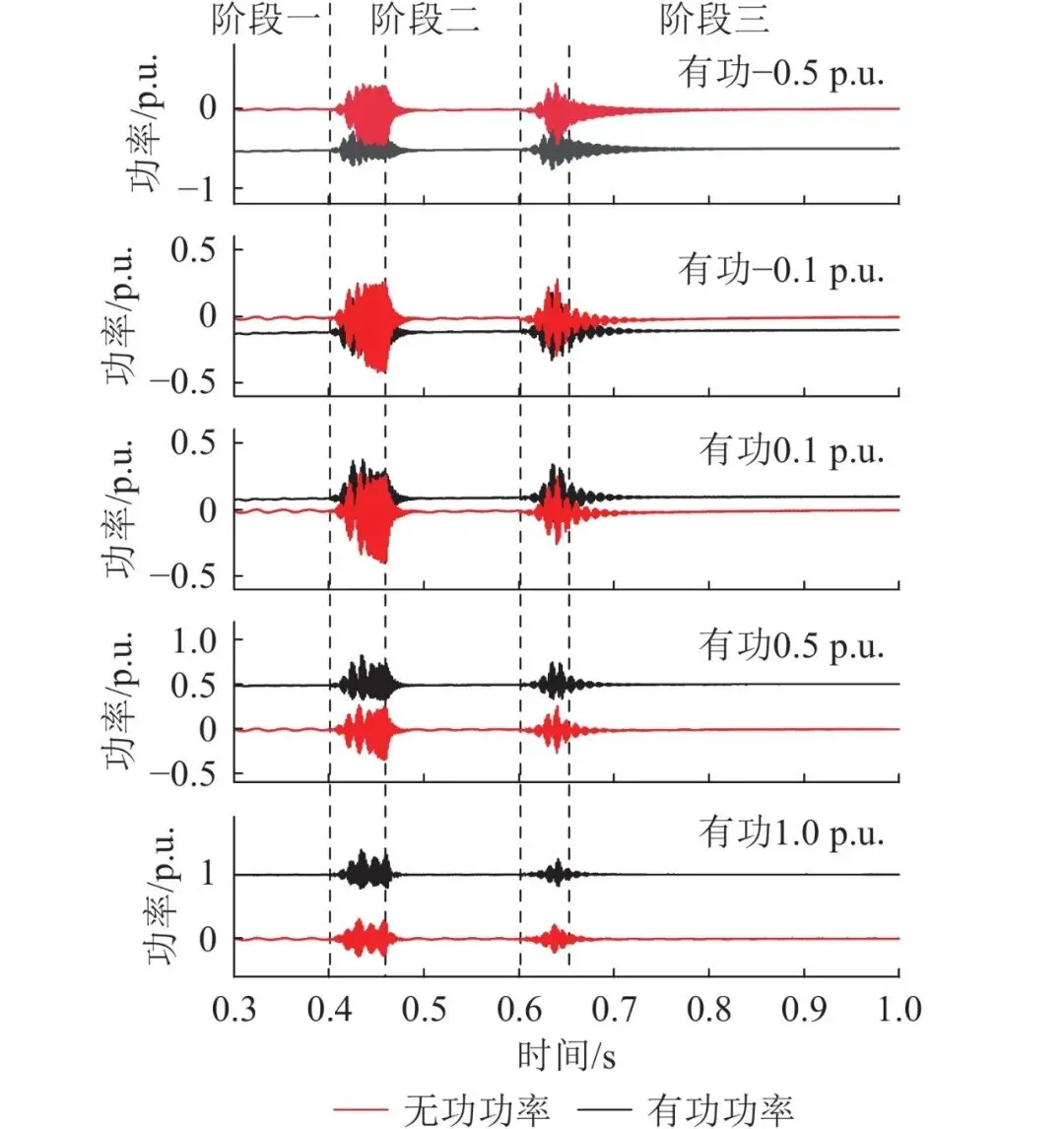
图18 不同有功工况下高频振荡抑制验证
综上,高链路延时导致的高频振荡需要更多步数的预测控制进行抑制,且多步预测控制方法具有一定的适用性,适用于不同MMC工况状态。
5. 结论
文中运用Z变换对MPC下的MMC进行正负序阻抗建模,在保证MMC系统自身稳定的前提下,采用阻抗法分析MMC产生高频振荡和多步预测抑制振荡的机理。结论如下:
(1) 对MPC进行正负序阻抗建模,验证其理论建模的正确性,高频处平均值模型与详细模型基本吻合。
(2) 通过传递函数对MMC进行本体稳定性判定,并运用阻抗法分析MPC产生高频振荡的机理。在预测控制中,链路延时越高,MMC负阻尼特性程度越大,越有可能产生高频振荡甚至本体失稳,需要加入合适的控制方式补偿链路延时,从而实现MMC稳定。
(3) 多步预测控制在特定高频段能极大地优化负阻尼区域,且随着步数的增大,补偿链路延时的时间越长。

钱学威(1999):男,硕士在读,研究方向为柔性直流输电技术(E-mail:1214664133@qq.com);
李云丰(1988):男,博士,副教授,研究方向为柔性直流输电技术、新能源与储能技术;
文涛(2000):男,硕士在读,研究方向为柔性直流输电系统稳定性分析。
韩雪, 梁慧琳. 基于限流电感的MMC-HVDC电网故障检测与保护方案. 电力工程技术, 2026, 45(1): 39-50.
刘晨旭, 何柏娜, 冯汝明, 等. 低全桥比例混合型MMC换流器直流故障穿越方法. 电力工程技术, 2026, 45(1): 72-82.
王骆, 王宁, 张倩茅, 等. 基于主从能量控制的MMC-MTDC盈余功率消纳策略. 电力工程技术, 2026, 45(1): 93-105.
马文忠, 孙沐紫, 王玉生, 等. 弱电网下MMC高低压穿越的综合运行控制技术. 电力工程技术, 2025, 44(2): 123-133.
苏田田, 路茂增, 马新喜, 等. MMC器件损耗分布与电容电压纹波综合优化方法. 电力工程技术, 2024, 43(3): 32-41.
郑重声明:根据国家版权局相关规定,纸媒、网站、微博、微信公众号转载、摘编本微信作品,需包含本微信名称、二维码等关键信息,并在文首注明《电力工程技术》原创。个人请按本微信原文转发、分享。
编辑:张甜甜
校对:吴 楠
审核:江林
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 长沙地名趣谈(三十六)
- 卧!薛之谦长沙二开时间来了!薛之谦长沙演唱会二开!没抢到票的速来!
- 双休+房补+五险一金!长沙经开区这家拿下30多个大牌订单的制冷高新技术企业招人
- 4月18日开跑!2026长沙县村跑路口站正在报名中→
- 第335篇 长沙之行快乐翻倍
- 跟着地铁、学校、医院走!2026长沙商铺投资的“躺赢”逻辑
- 长沙这辣椒园,上《人民日报》了!
- HUAPEIN 华桢木作|2026长沙建博会圆满落幕,以匠心铸品质,用实力赢口碑
- 浏阳凭什么成为全国最吃香城市?长沙、株洲、江西都比不上
- 长沙兼职|薛之谦演唱会安保130|玩偶发单130|山姆超市21/h|分拣打包170|全职|3月25-31日及近期~岗位更新
